码垛机器人的工作流程介绍
2021-09-16 11:13:37
l律拓
码垛机器人的工作流程介绍
1、粉体灌装:空袋通过人工或者自动化上袋机进行上料,粉体灌装后,通过缝包机机对袋口进行自动封口
2、包装袋倒袋和提升:成品包装袋装完料后都是是站立状态,而码垛机器人抓取是又必须是平躺状态所以必须经过倒带装置把站立料包进行推到,一般过是经过气缸推倒包装袋使其呈现平躺状态,再经过圆盘旋转使包装袋回整到输送带中间,然后包装袋进入提升皮带,提升皮带的两边安装有调整挡板,将包装袋调整到规定位置。提升皮带将包装袋提升到码垛机器人平台。包装箱不需要此装置,包装好后可直接输送至码垛输送线上(待码机)。
3、包装袋整理:包装合格的包装袋经输送机送到整平机,利用整平机将包装好包装袋进行压平操作,将物料压实均匀充满包装袋,保持袋型平整;包装箱无需压平理。
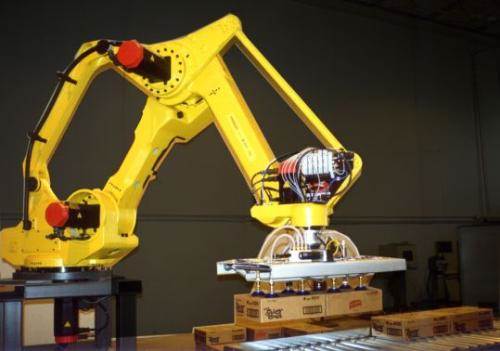
4、机器人抓取:整理好的包装袋到达待码机上,码垛机器人检测到待码机上有包装袋(包装箱)后,搬运机器人到达定位张开夹起包装袋进行抓取,按照设置好的编组进行堆放、码垛。
5、垛盘输送:将包装袋(包装箱)按照设置好的垛型进行码放,完成码垛后有叉车或行车直接将托盘运走,完成码垛工序。