


喷涂机器人离线编程系统简介
喷涂机器人离线编程系统简介:
喷涂机器人离线编程系统是利用计算机图形学的成果,建立起机器人及其工作环境的几何模型,再利用一些规划算法,通过对图形的控制和操作在离线的情况下进行轨迹规划。通过对编程结果进行三维图形动画仿真,以检测编程的正确性,最后将生成的代码传到机器人控制柜,以控制机器人运动完成给定的任务。
喷涂机器人离线编程系统的结构主要包含以下六大模块:物体造型模块、参数设置模块、喷枪轨迹生成模块、机器人运动轨迹生成模块、分析仿真模块和机器人程序生成模块(如图1.1)。下面对其功能以及各模块间的关系作简单介绍。
1、物体造型模块:
对于平面或规则曲面,可直接写出其表达式。对于自由曲面,可采用三角划分的方法对曲面进行造型。可以通过标准图形接口(如IGES)直接把其他CAD系统的CAD数据转换过来或者通过扫描直接获得物体数据。经过造型后,系统CAD数据库中就存放了物体的CAD数据,为喷枪轨迹生成的模块提供了工件数据信息。
2、参数设置模块:
用于指定喷枪的张角、涂料速率通量、喷涂距离、需要的涂层厚度、允许的涂层厚度偏差、喷涂时间等参数、然后被传送到喷枪轨迹生成模块。
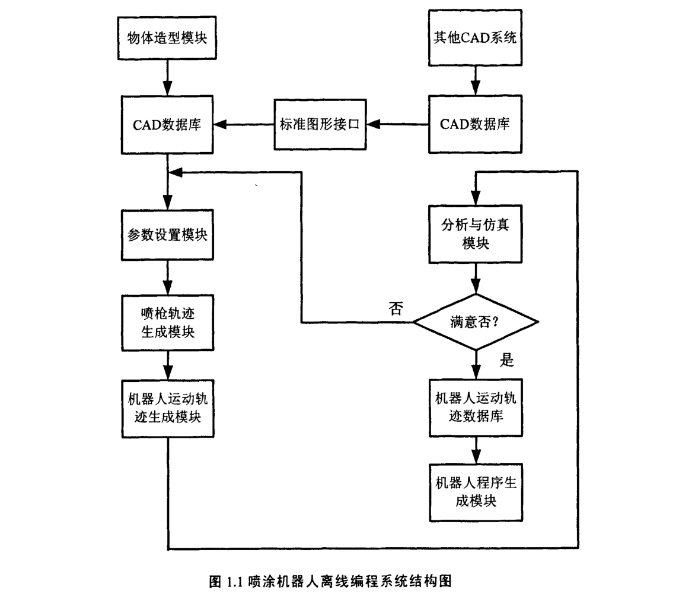
该模块主要是喷枪轨迹的设计与优化,它是整个系统的核心。首先根据前两模块所传来的数据与喷涂过程中各种参数,针对不同外形的工件采用不同的方法建立喷涂过程中涂料的空间分布模型并确定喷涂作业的优化目标,然后采用适当的算法求解目标函数的极值并自动生成能产生最佳喷涂效果的喷枪轨迹。用户还可以在此模块中设定喷枪走向,然后由此模块对其进行参数优化,输出一条优化的喷枪轨迹。本文主要研究的就是喷枪轨迹生成模块中的喷枪轨迹设计与优化方法。
本模块的主要功能是根据机器人逆运动学原理,将上一模块所生成的喷枪运动轨迹(或机器人手臂末端工具运动轨迹)转换成机器人各关节的运动轨迹,从而为分析仿真模块提供机器人的运动数据。
5、分析仿真模块:
本模块式根据前面各模块所传来的工件CAD数据、各种参数、喷枪轨迹和机器人的运动轨迹,图形化显示喷枪沿某一指定路径喷涂时工件表面的涂覆情况并以列表形式给出工件表面上涂层的平均厚度及其偏差数据,也可以用等高线配以不同色彩的方式在计算机屏幕上显示出涂料的空间分布效果图。在此过程中用户可以检查机器人各关节的运动是否满足其约束条件,是否发生机械手碰撞工件的情况,以便反复修改喷枪参数、路径,最终得到最佳的喷涂效果,从而可以将机器人的运动轨迹写入轨迹数据库,提交机器人程序生成模块。
完成将机器人的运动轨迹(由机器人运动轨迹生成模块提供)转变成其能识别的程序语言。
